Project Description
The CAT 5110B is a heavy demolition excavator whose undercarriage must be disassembled when the machine is transported. To disconnect the crawler tracks, large steel pins must be removed. Each pin weighs 160 kg, making manual removal practically impossible and hazardous for personnel.
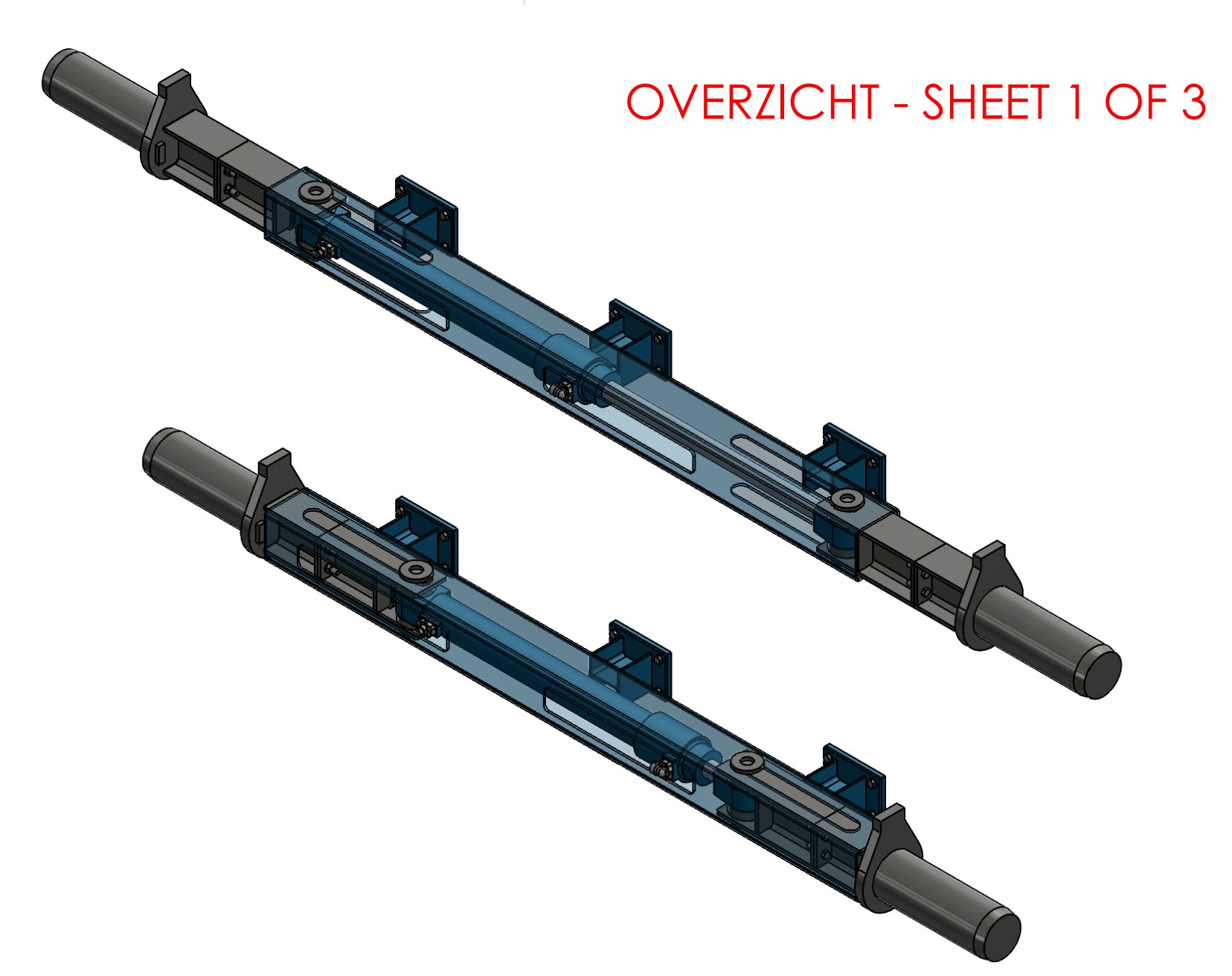
Kuijpers Technical Designs developed a hydraulic pin manipulator for this purpose. The tool uses two existing bucket cylinders (110-70-1055 mm), one cylinder per sleeve, allowing two pins to be pushed out or in simultaneously. The design utilises existing components to reduce costs and simplify maintenance.
Technical Specifications
- Machine: CAT 5110B demolition excavator
- Pin weight: 160 kg each
- Drive: 2× hydraulic bucket cylinder (Ø110/70 mm, stroke 1055 mm)
- Operation: 1 cylinder per sleeve, two pins simultaneously in or out
- Total manipulator weight: 808 kg
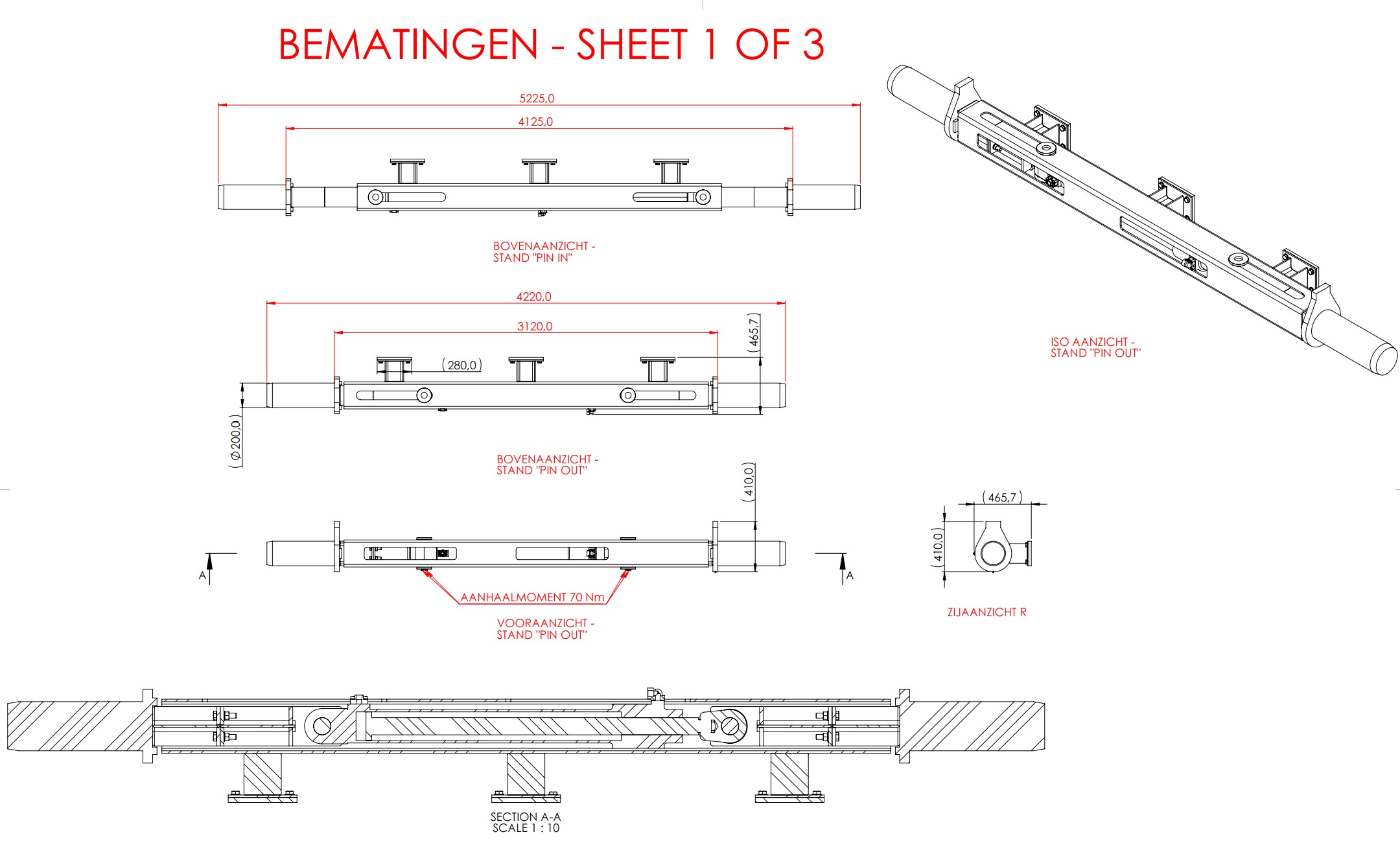
- Dimensions extended (pin out): 5225 × 4220 mm
- Dimensions retracted (pin in): 4125 mm length
- Bolt torque: 70 Nm
- Construction material: S235J0 / S355J0
- Drawing number: KTD113_v3-00
Design Principles
- Use of existing bucket cylinders for cost efficiency
- Simultaneous removal of two pins for rapid disassembly
- Robust steel construction suitable for heavy demolition work
- Compact storage when pins are pushed in
- Design compliant with ISO 2768-M and ISO 2768-K tolerances
Application
The pin manipulator is deployed whenever the CAT 5110B needs to be transported. By using the excavator's own hydraulic system, no external power source is required. The two cylinders synchronously push the pins out of the undercarriage, after which the crawler tracks can be disconnected. During reassembly, the pins are pushed back in using the same method.
Photos & Drawings